PosVistaPro
High-Precision GNSS/INS Post-Processing Software
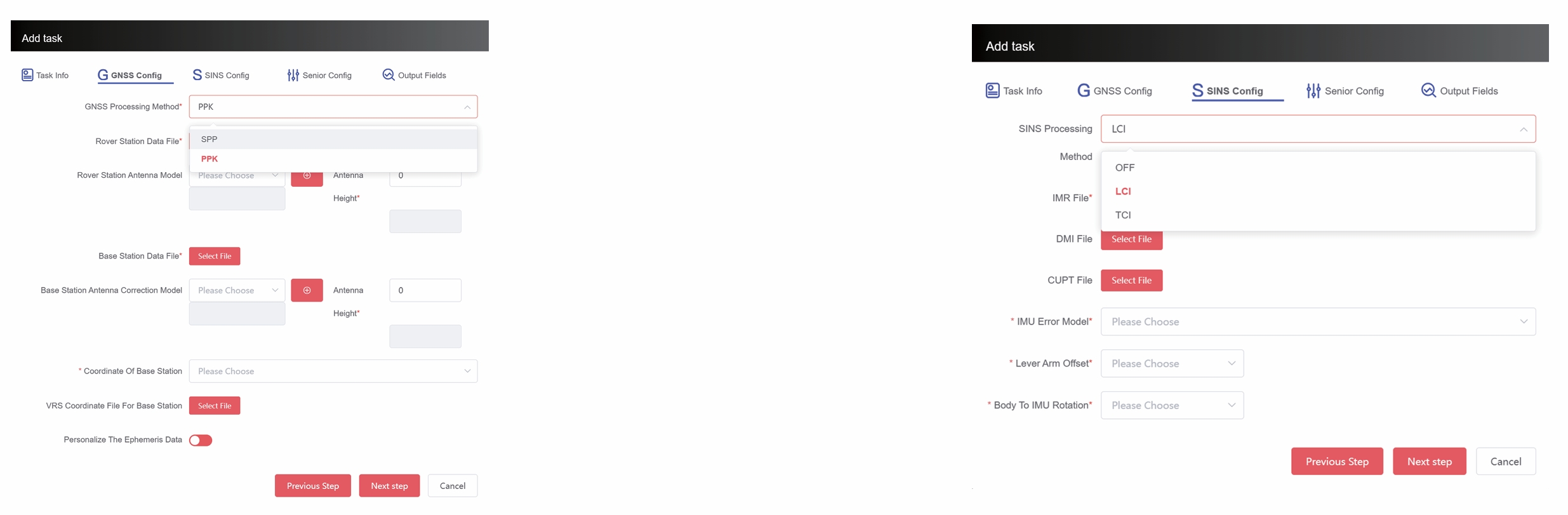
PosVistaPro is a high-precision GNSS/INS post-processing software that employs advanced multi-source sensor fusion algorithms, flexible GNSS data analysis strategies, and a highly automated processing workflow. It provides continuous, stable, and reliable high-precision positioning trajectories even in complex environments where satellite signals are obstructed or interrupted.
The software supports multi-constellation and multi-frequency GNSS observation data, and is compatible with raw IMU data from different grades (MEMS/FOG/RLG). It adapts to multi-brand receivers and various types of inertial navigation equipment, offering excellent openness and adaptability.
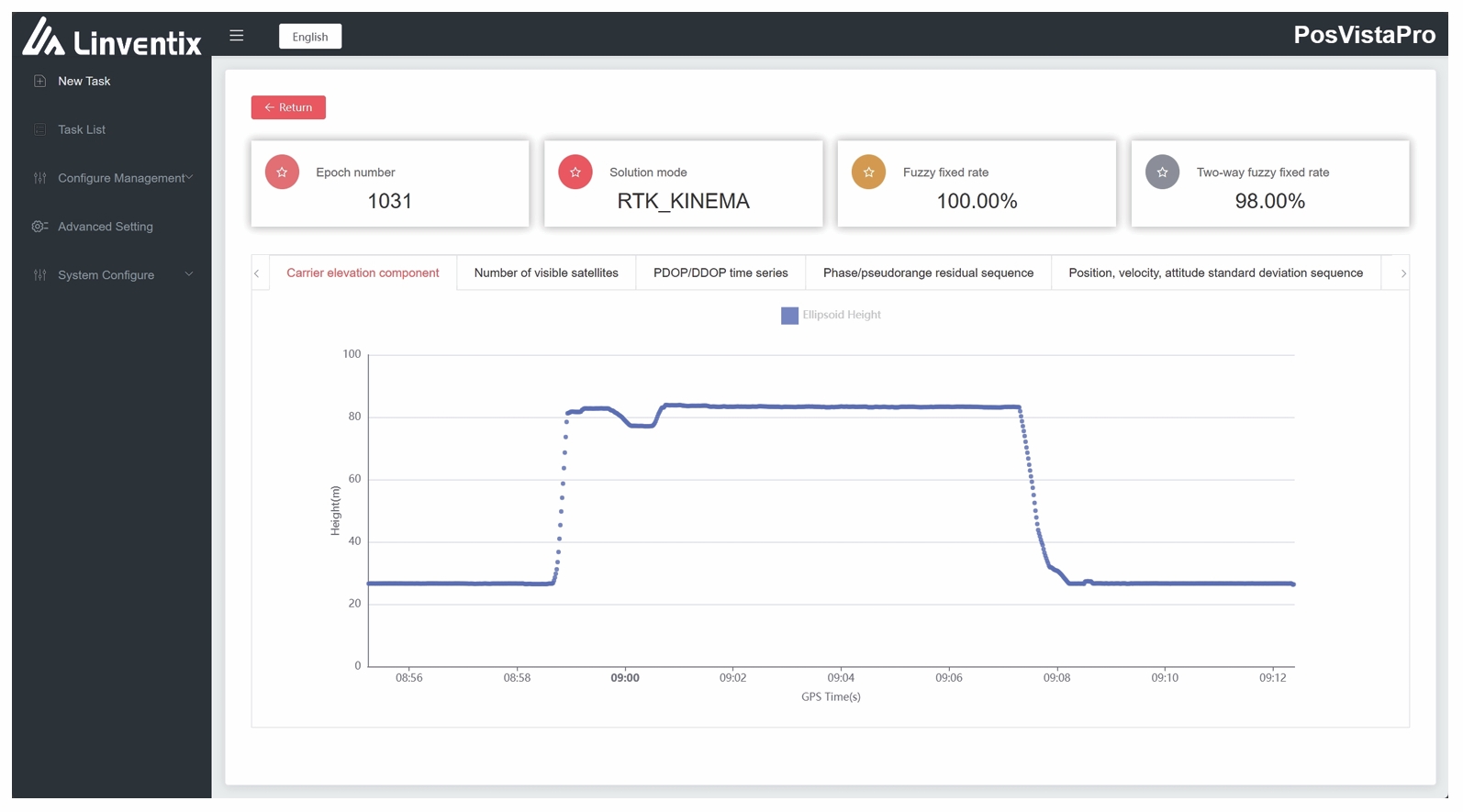
In terms of data processing, PosVistaPro offers multiple precise solution modes including SPP and PPK, enabling rapid generation of high-precision POS outputs. It also features a professional-grade quality assessment system to help users efficiently complete tasks such as aerial surveying, mobile mapping, UAV platforms, robot navigation, and marine surveying.
Key Features
Multi-Constellation High-Precision GNSS Solution
Supports GPS/GLONASS/Galileo/BeiDou, with full-mode SPP/PPK/PPP. Adapts to multi-base station and Virtual Reference Station data solutions, maintaining precision stability over large-scale tasks
GNSS/INS Tightly Coupled Fusion Algorithm
Combines inertial-assisted gross error detection and cycle slip repair mechanisms to significantly improve ambiguity resolution rates and overall positioning accuracy
IMU Automatic Alignment Mechanism
Built-in inertial navigation automatic detection and alignment function, enabling rapid completion of IMU initial alignment without manual intervention
Flexible Deployment and Customization
Compatible with various sensors, featuring an automated workflow that significantly lowers the barrier to use. The core algorithms adapt to multiple CPU architectures and operating systems, and provide scalable SDK interfaces for customization according to customer needs. Supports local and cloud deployment for easy handling of large-scale data tasks
Three Atmospheric Models Available
Built-in SS/GS/UM atmospheric models suitable for different climate zones worldwide, improving convergence stability for long baselines and PPP solutions
PosVistaPro Provides stable and reliable high-precision trajectory solutions for applications such as aerial surveying, mobile mapping, UAVs, robots, and marine surveying. With superior stability, adaptability, and intelligent processing capabilities, it significantly enhances precise positioning capabilities
Core Advantages
Multi-Station Ambiguity Resolution
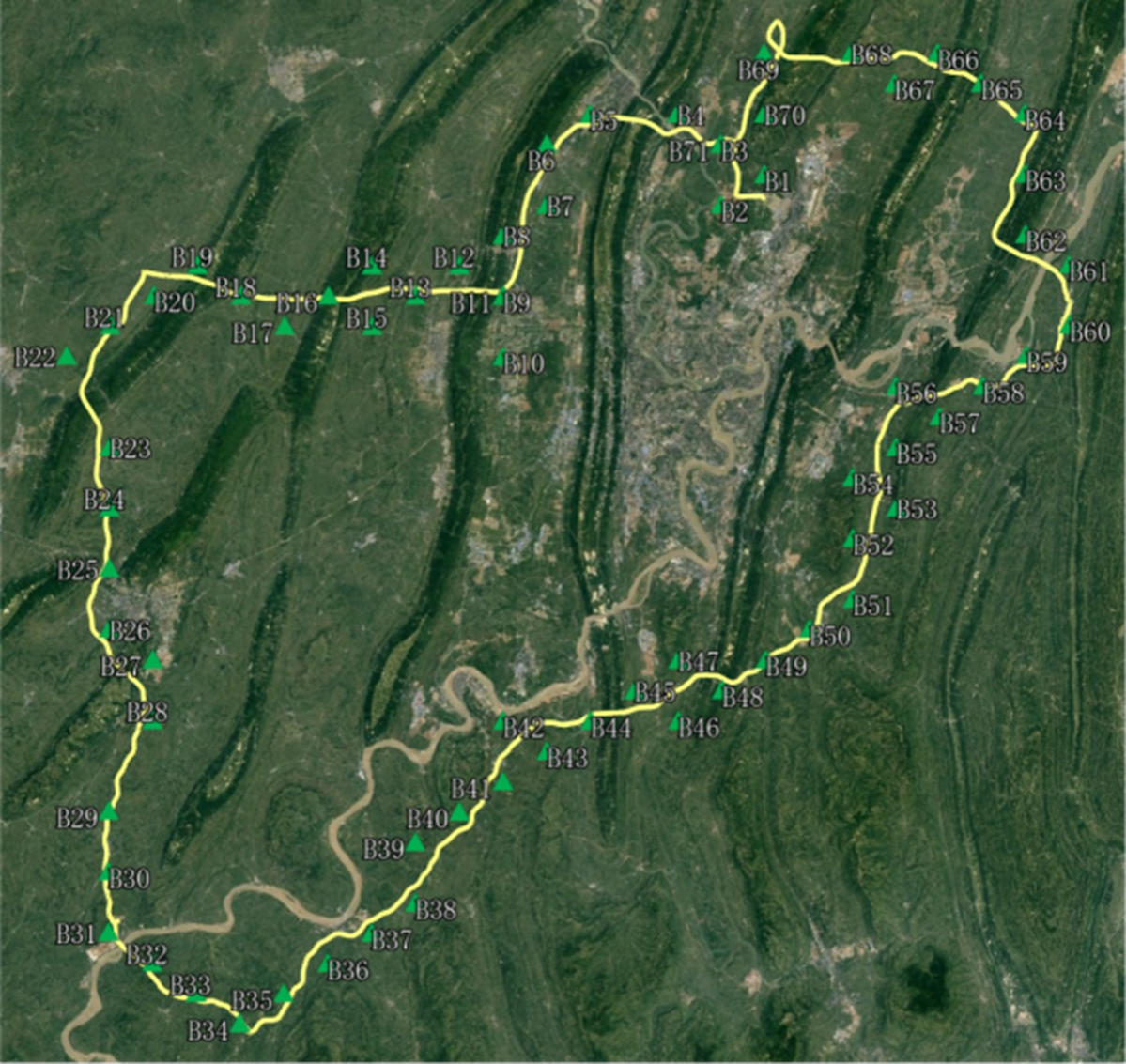
Function: Supports post-processing solutions for any number of base stations, enabling lossless ambiguity transfer between base stations for large-scale high-precision positioning tasks
Project Case: Generated 71 Virtual Reference Stations along a route, with a total distance of approximately 400 km, a maximum east-west span of approximately 106 km, and a maximum north-south span of approximately 115 km
CYCLE SLIP DETECTION & REPAIR
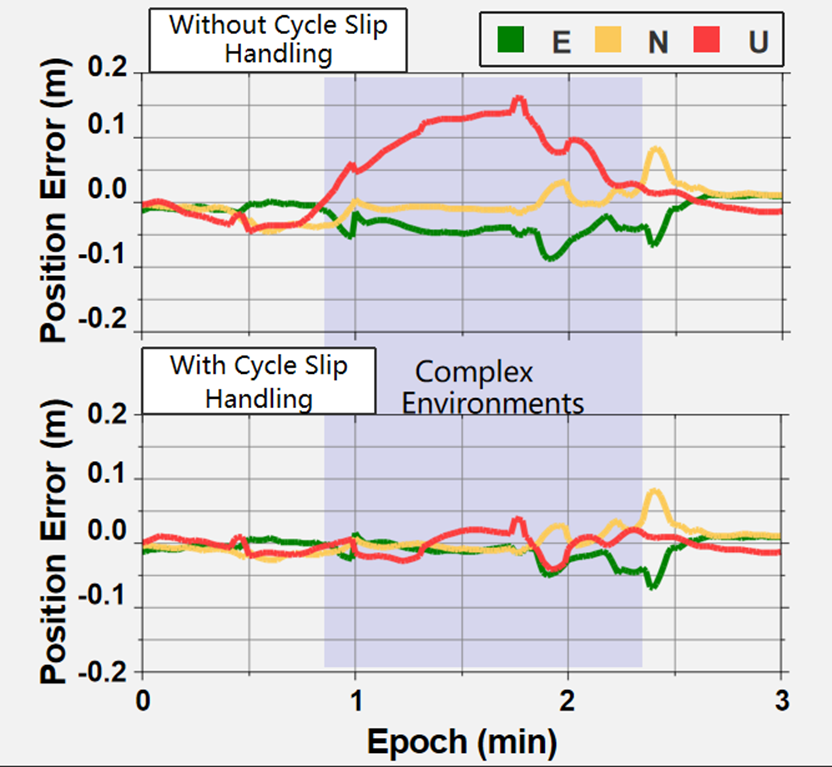
By introducing inertial short-term high-precision recursive displacement and combining TDCP with filtering estimation strategies, it achieves accurate detection and recovery of carrier cycle slips. Significantly improves positioning accuracy and reliability in complex environments, ensuring correct cycle slip identification and complete repair
Layered Observation Updates
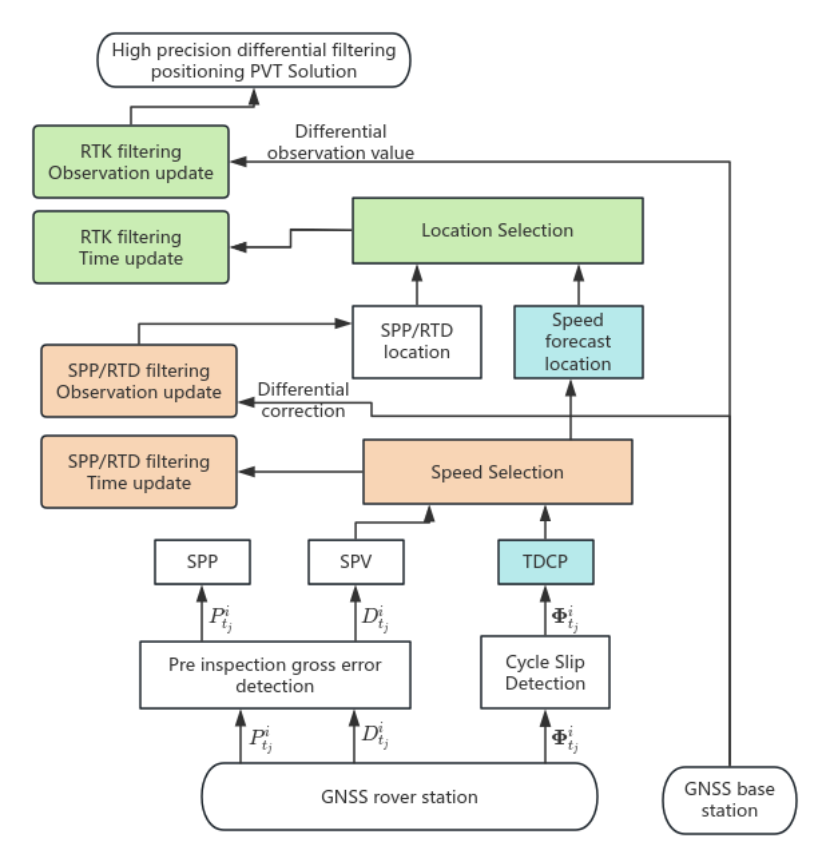
Selects the best among various position/velocity results from GNSS solutions, fully utilizing observation information through filtering for layer-by-layer filtering updates, outputting high-priority positioning results, and enhancing final accuracy
Rapid Dynamic Alignment

Algorithm Principle: Based on the specific force integration of INS equations, using the q-method to obtain initial attitude.
Convergence Criteria: Converges heading error to < 3° during the alignment phase. Suitable for any carrier type and motion state, achieving rapid attitude convergence and stable initialization
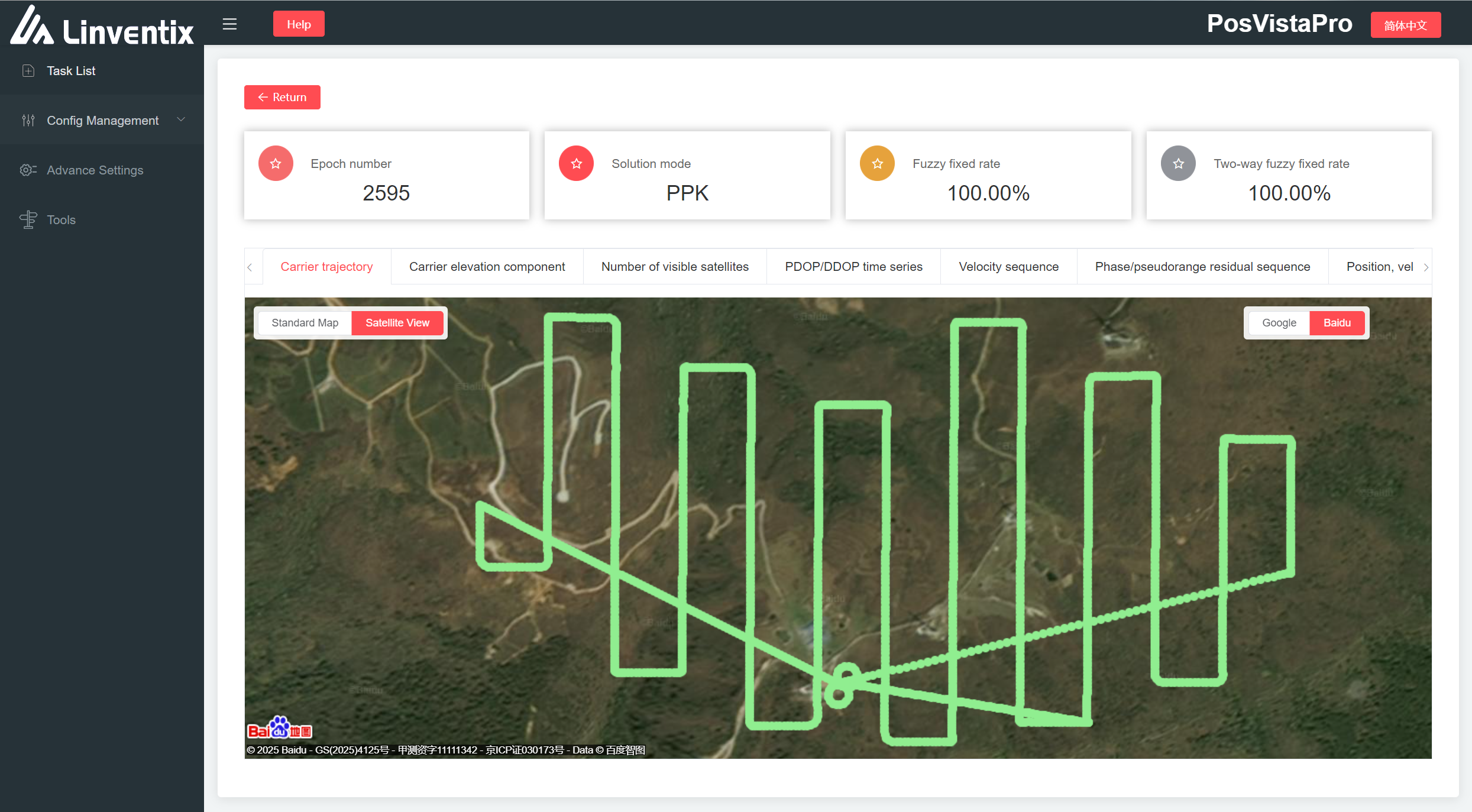
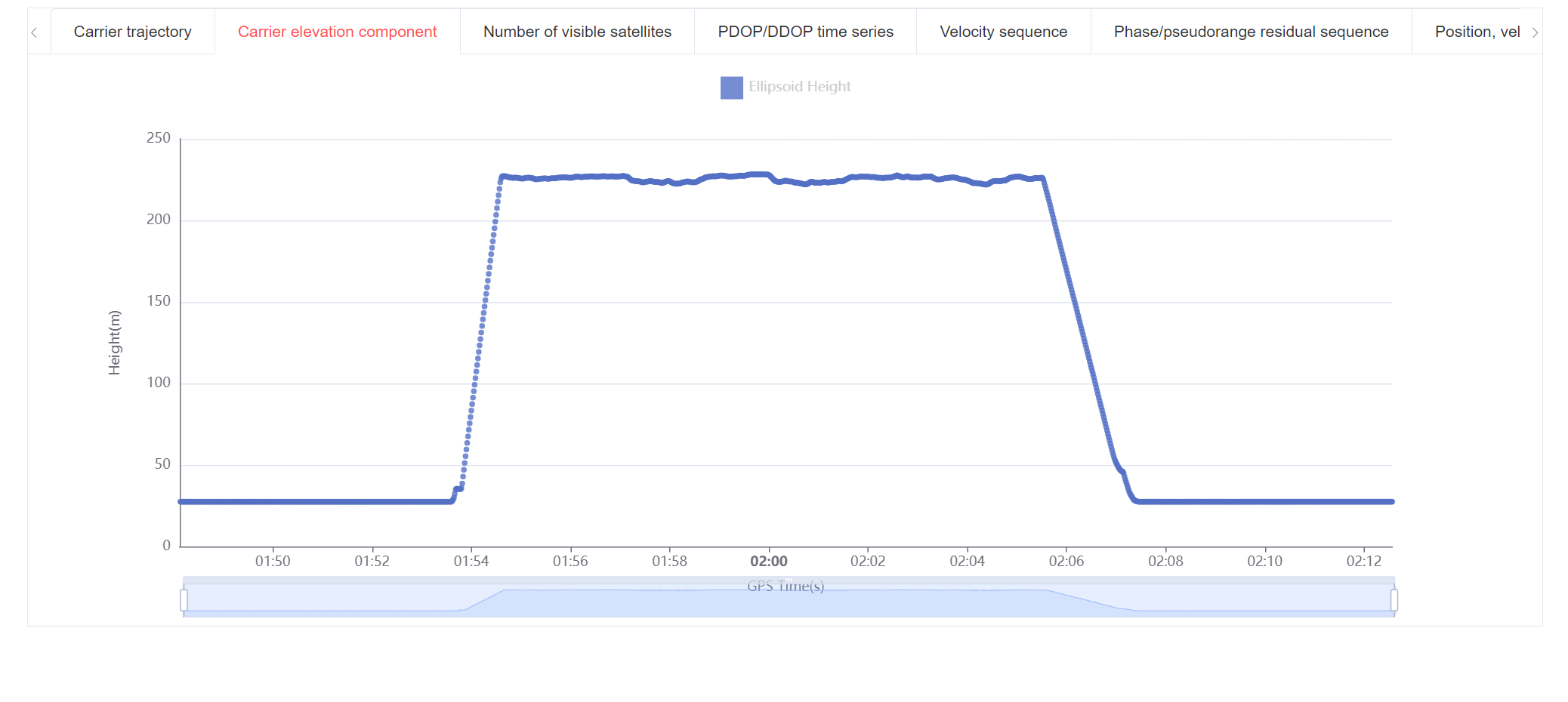
Airborne Data PosVistaProBenchmarking
Maintains high fixation rates and continuous, stable trajectory outputs in UAV + LiDAR operations. Through reliable GNSS/IMU fusion algorithms, it effectively avoids trajectory jumps and attitude inconsistencies caused by signal obstructions, resulting in smoother trajectories, more stable attitudes, and significantly improved point cloud accuracy and consistency, providing a high-quality POS data foundation for surveying and engineering applications.
Test conditions:
LiDAR: FT-800
IMU: HG4930
Drone: L-100
AGL: 200m
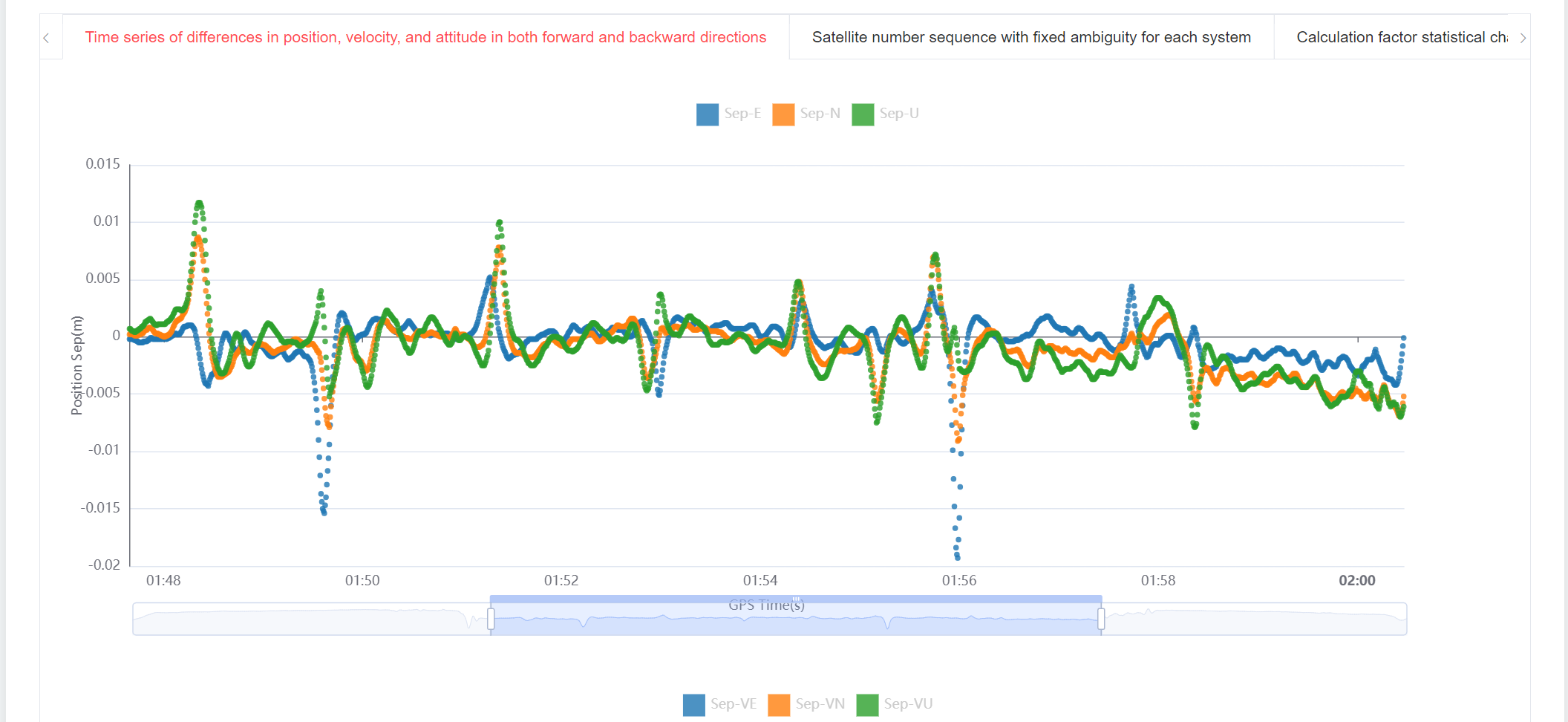
PosVistaPro performed forward and backward bidirectional precise solutions on GNSS and IMU data, achieving excellent continuity and stability throughout the flight through tight coupling fusion, observation optimization, and inertial-assisted cycle slip repair. The solution process achieved a 100% (forward)/99% (bidirectional) fixation rate, with smooth trajectories and no breaks
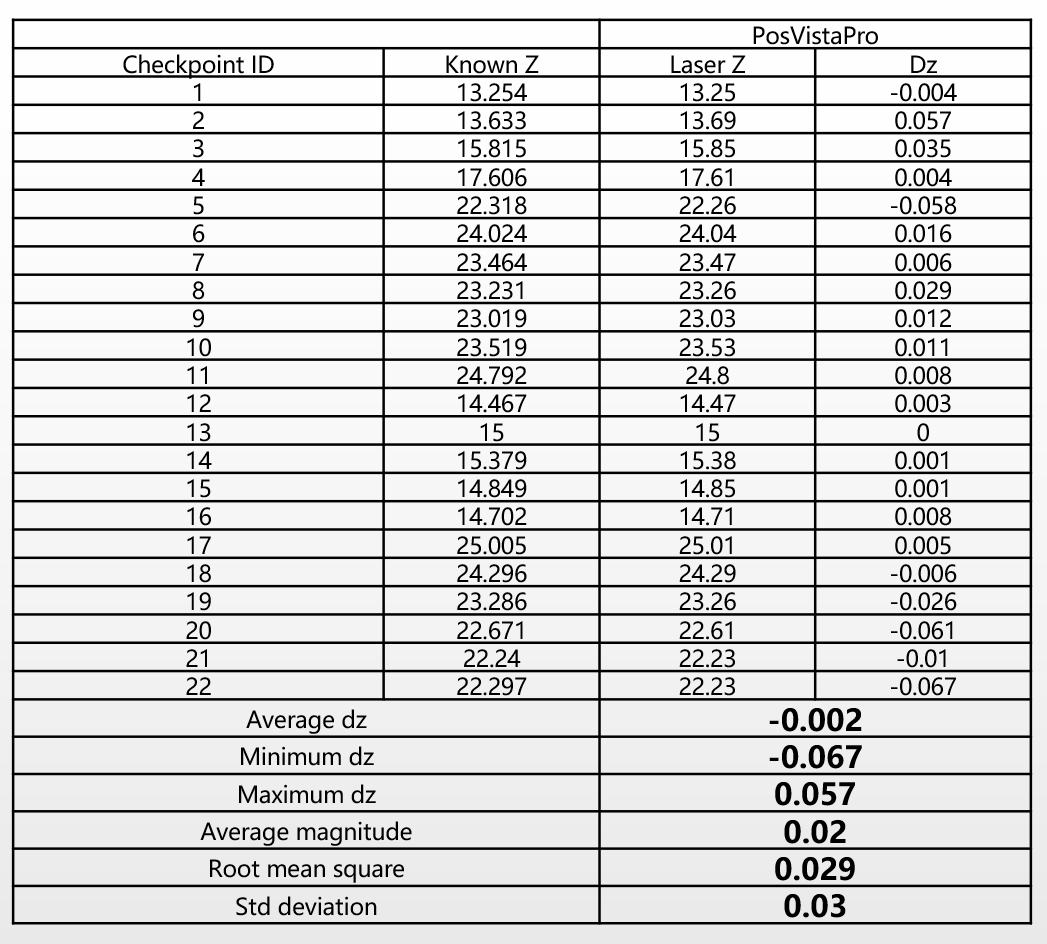
Based on high-quality POS outputs, the generated point cloud showed the following accuracy performance:
Average elevation error: -0.002 m
Maximum deviation range: -0.067 m ~ 0.057 m
Average error magnitude: 0.020 m
RMS: 0.029 m
Standard deviation: 0.030 m